Dynamic MAPF
Fall 2024
Tools:
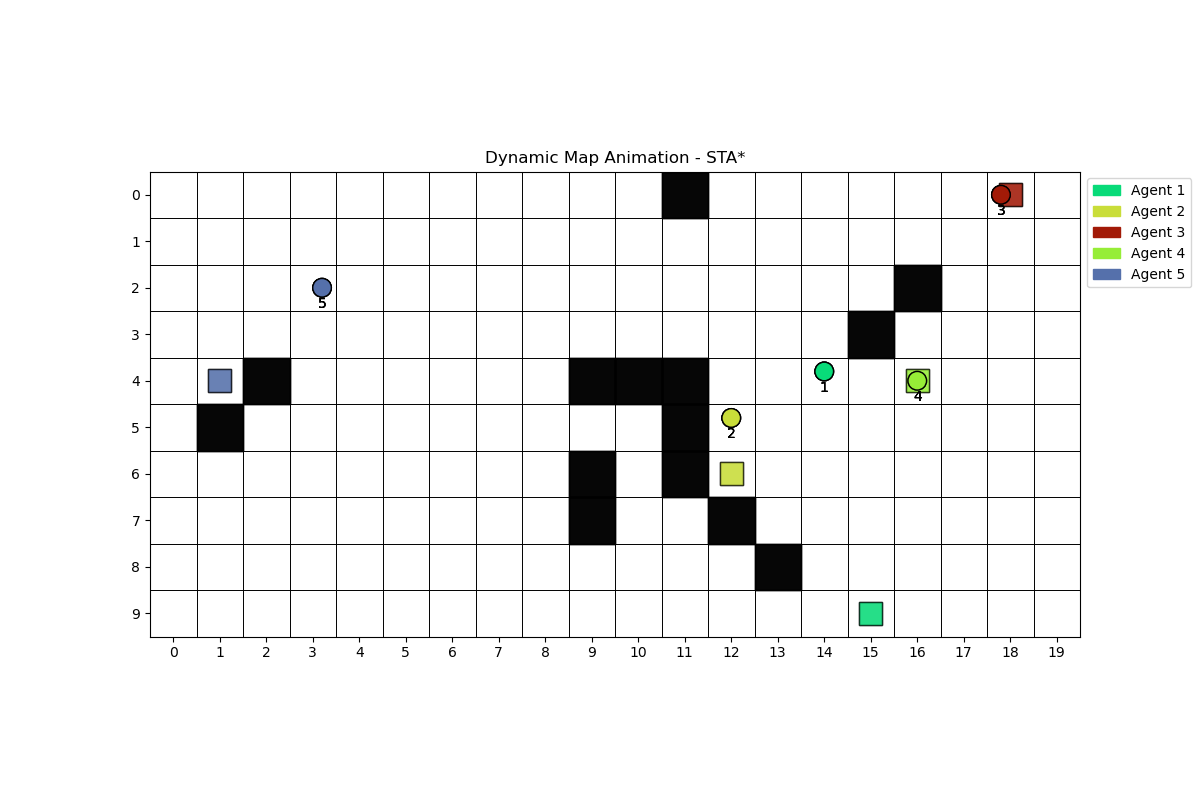
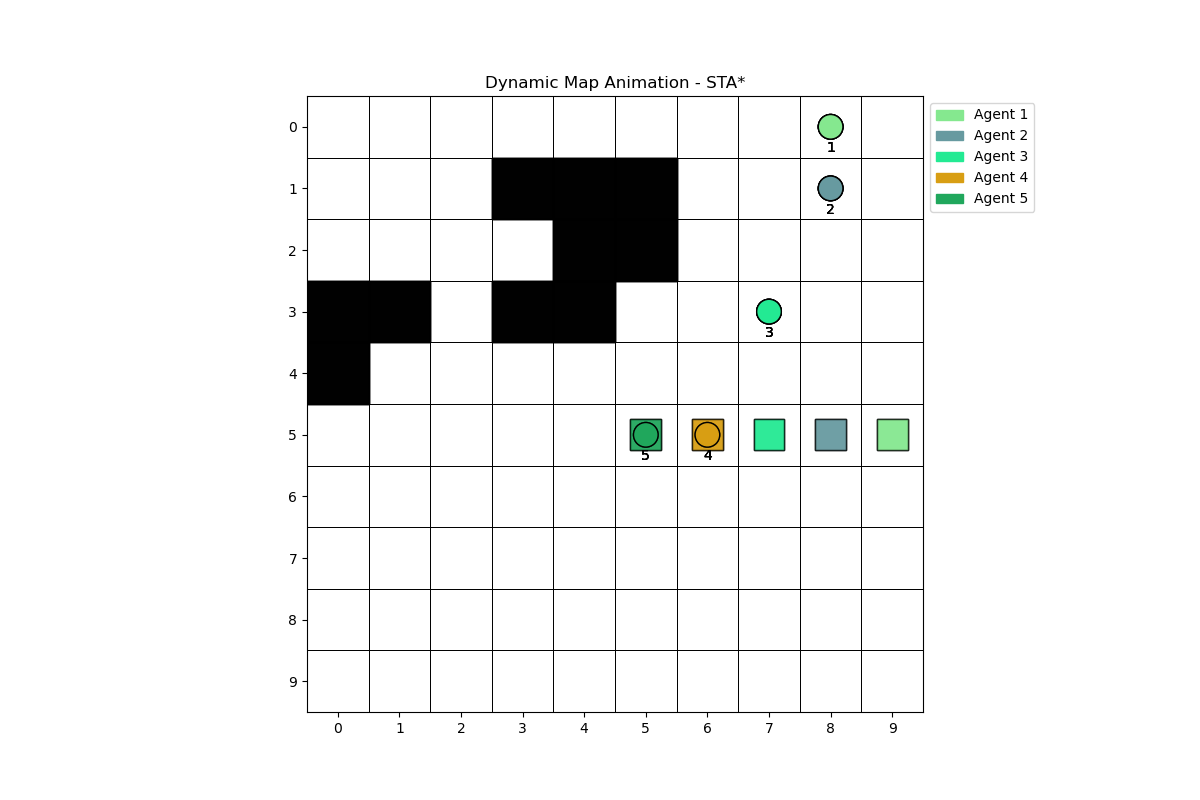
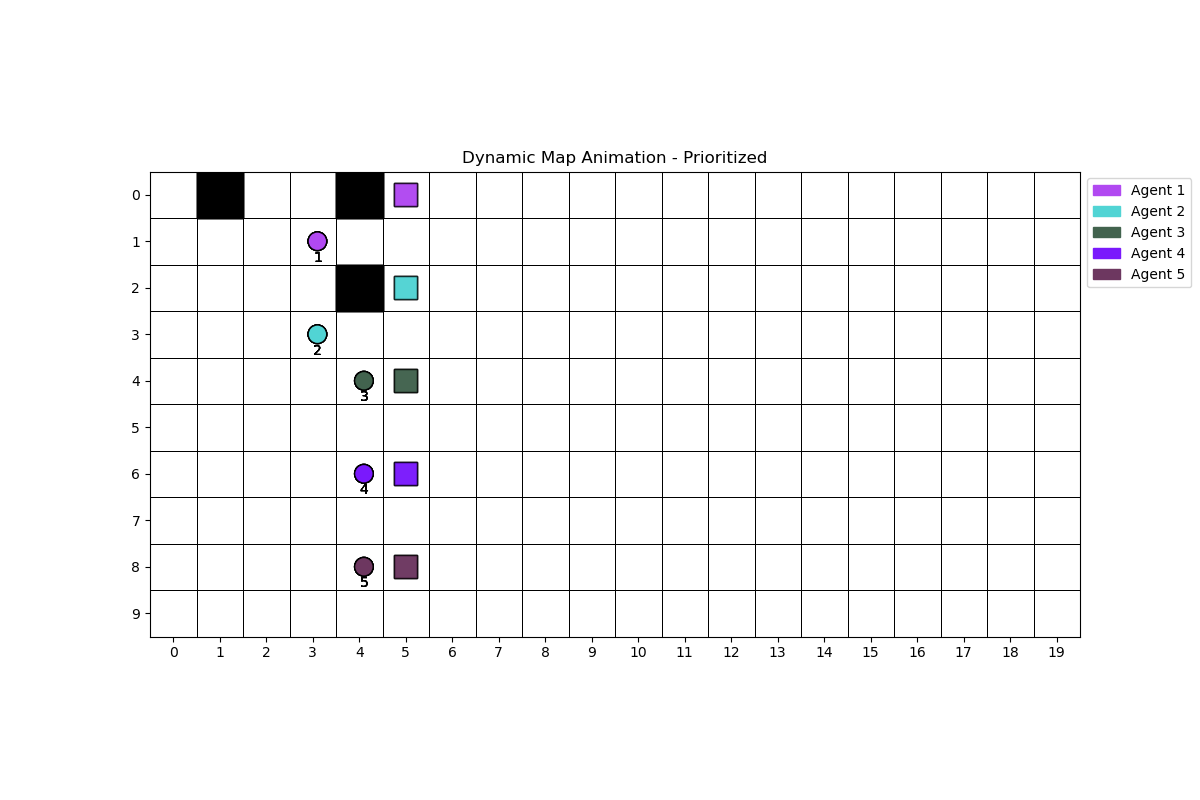
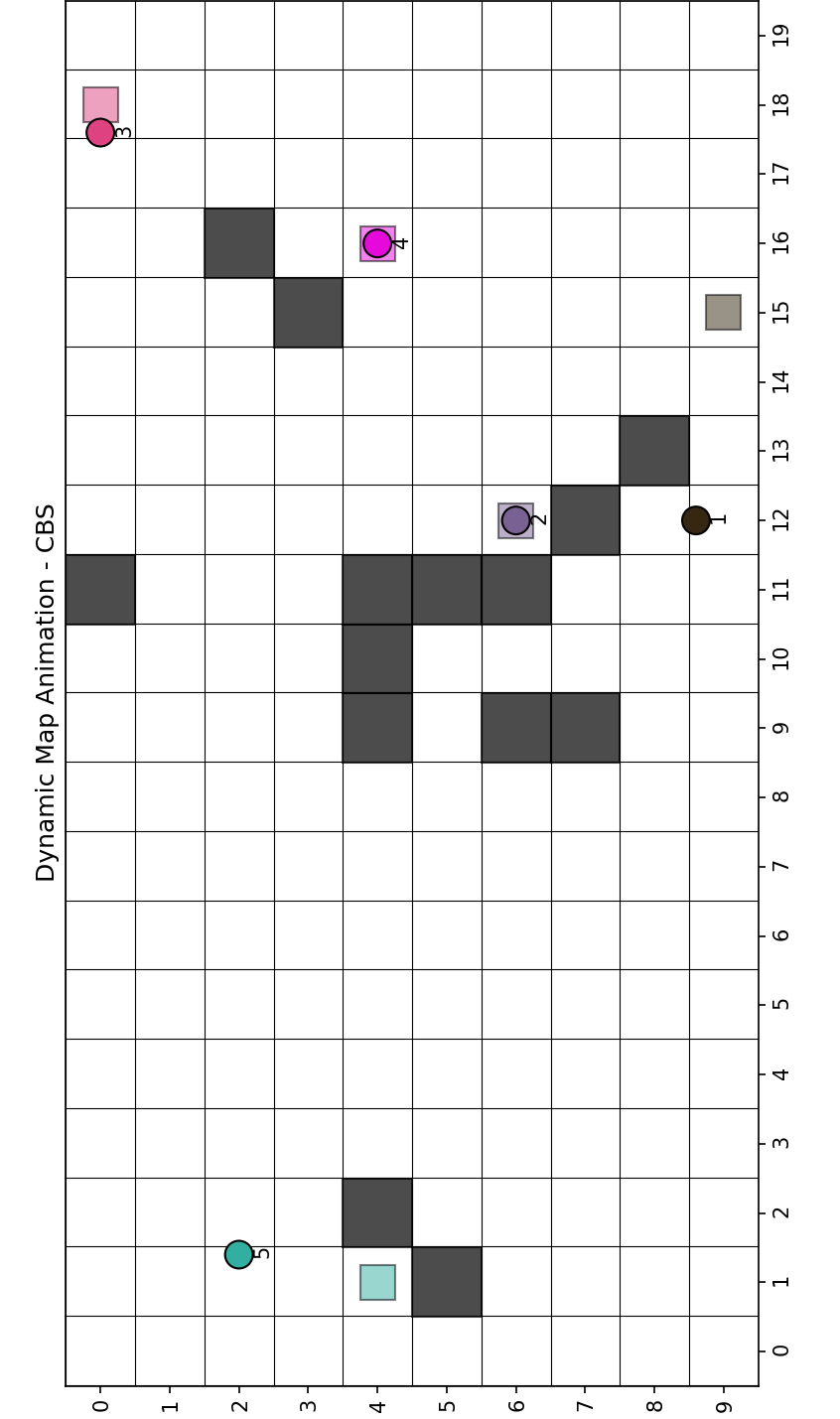
This project explores Dynamic Multi-Agent Pathfinding (MAPF), where agents navigate a changing environment with dynamic obstacles and goals.
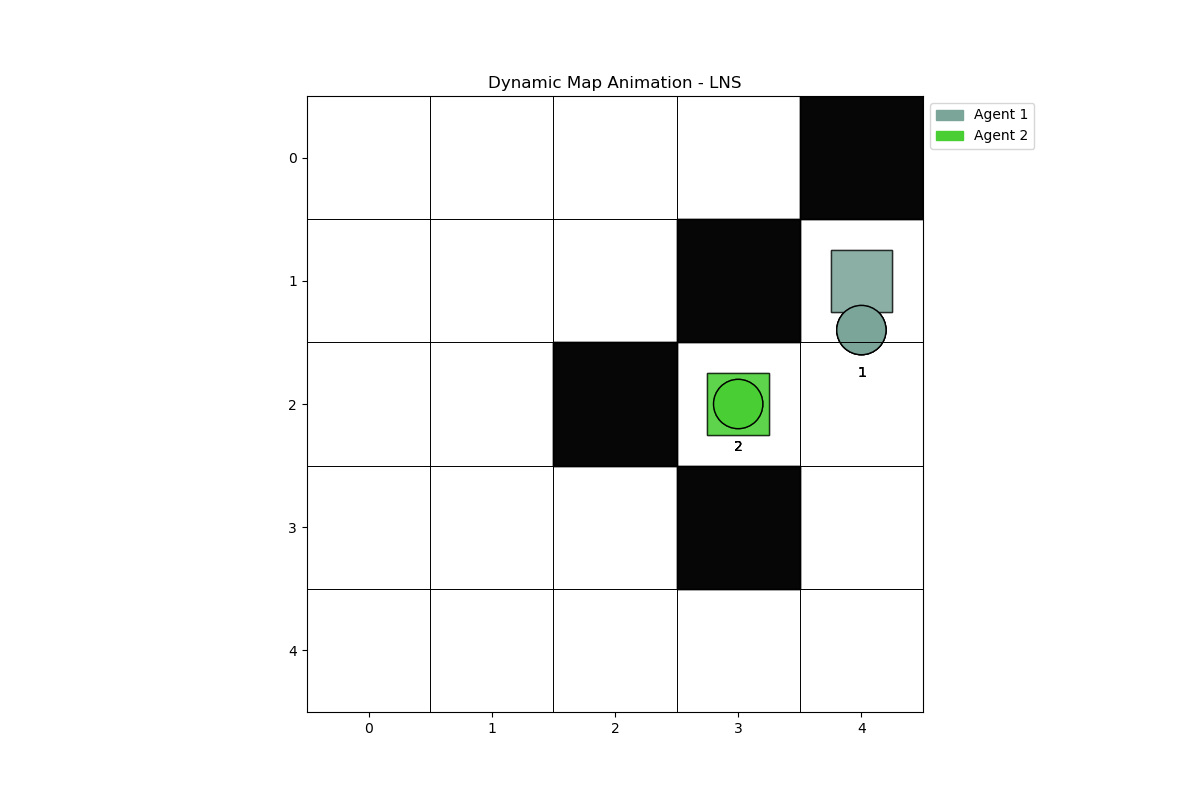
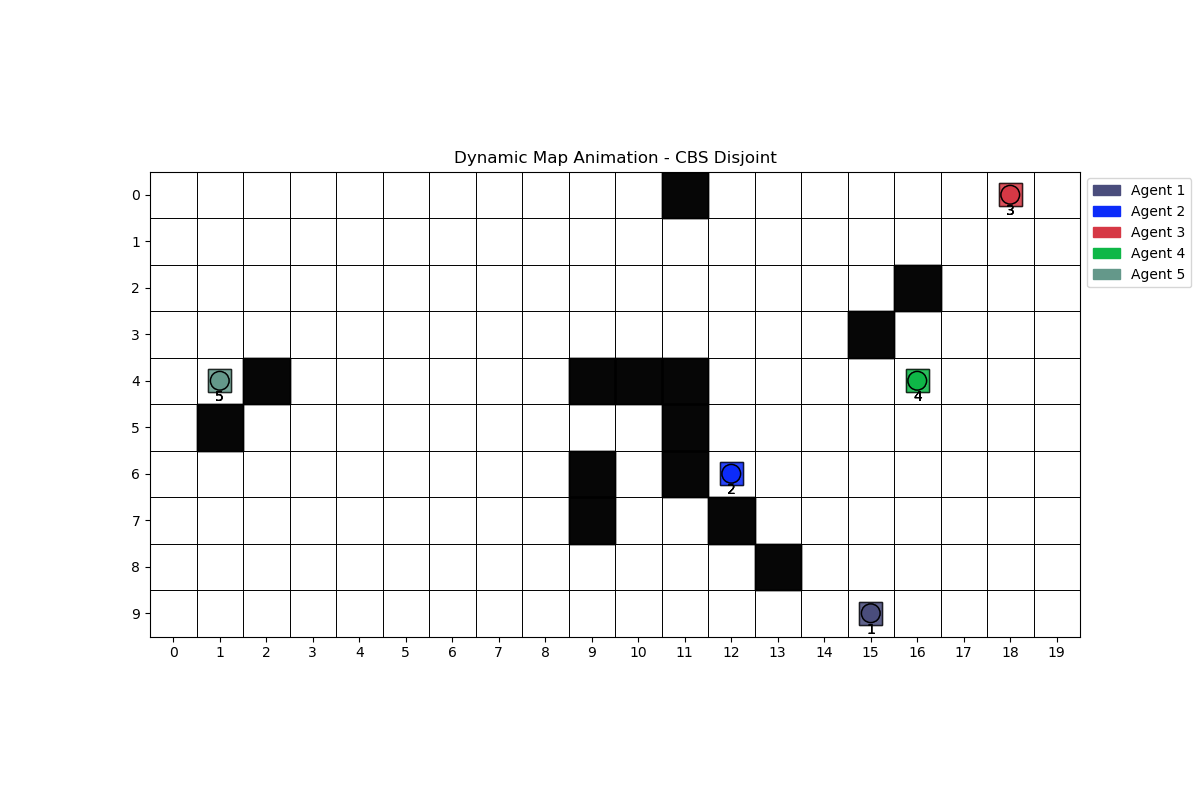
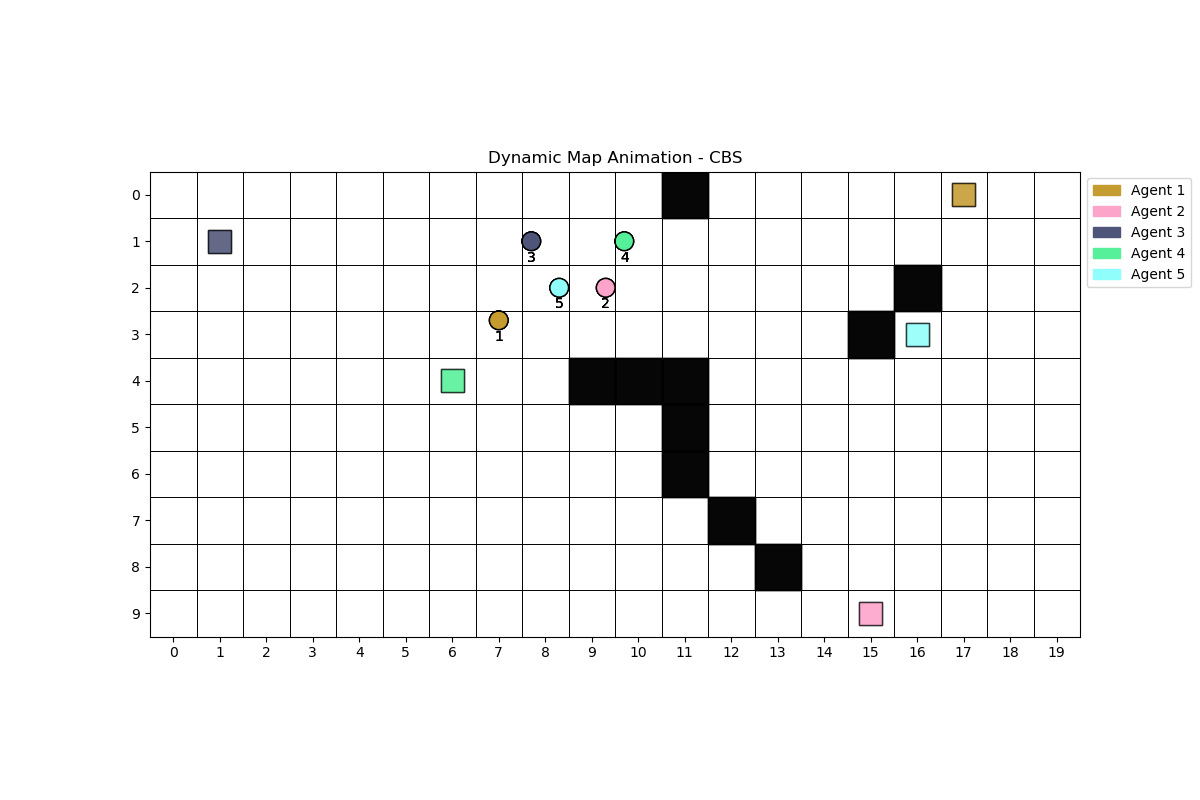
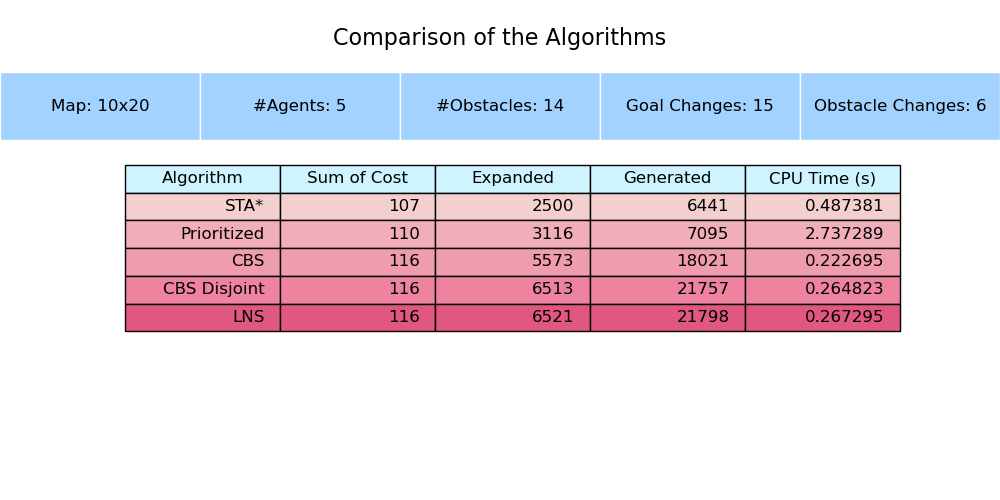
It builds on five algorithms: Space-Time A* (STA*), Prioritized Planning, CBS, CBS with Disjoint Splitting,
and Large Neighborhood Search (LNS).
The project, developed as a group effort involves map validation, visualization, and dynamic updates.
I developed the CBS and CBS with Disjoint algorithms, created a system to run and compare all algorithms,
and designed 5 out of 7 test scenarios (covering agent count, goal frequency, obstacle density, and map dynamics).
Additionally, I implemented core map-handling functionalities, contributed to algorithm integration,
and co-authored the report analysis and conclusions.